目标检测YOLO系列
YOLO笔记
目标检测模型分为两类,Region-free(单阶段方法), Region-based(两阶段方法)
目标检测的目的是在一张图片中找出物体,并给出它的类别和位置。目标检测每张图片的标注信息是所包含的N个实例框,每个框都有标注信息,中心位置、高和宽,以及类别。
两阶段方法
当图片中有多个类别时,需要将每一个类型都识别出来。那么在正常的识别过程中,会遇到的问题有:1)物体位置不确定,物体可能位于图像边缘,可能位于图像中间;2)物体大小不确定,物体可能在图像中占据大部分区域,也可能仅仅只有几个像素;3)物体种类不确定,一张图像中可能出现多个物体种类;
最原始的方法就是采用滑动窗口一个个地识别物体。如果一个物体正好出现在一个滑窗中,那么就将这个滑窗位置认为是这个物体所在的位置。滑窗每次滑动的距离是步长。为了保证每个物体都在一个滑窗中,可以将步长设置很小。同时,考虑到有不同大小的物体,滑窗也可以设置成不同大小。因此,这种方法在识别过程中,会设计不同大小的窗口,按照最小步长滑动,将窗口中的所有图片都放入分类器中。但是会花费大量时间。而R-CNN则会提前生成一系列窗口,就会节省大量时间。
YOLO
YOLOv1于2015年提出;
YOLO系列与两阶段算法不同,两阶段算法是优先算好哪些地方会出现物体,然后对这些框进行排除;而YOLO是直接对整张图像提取物体信息。
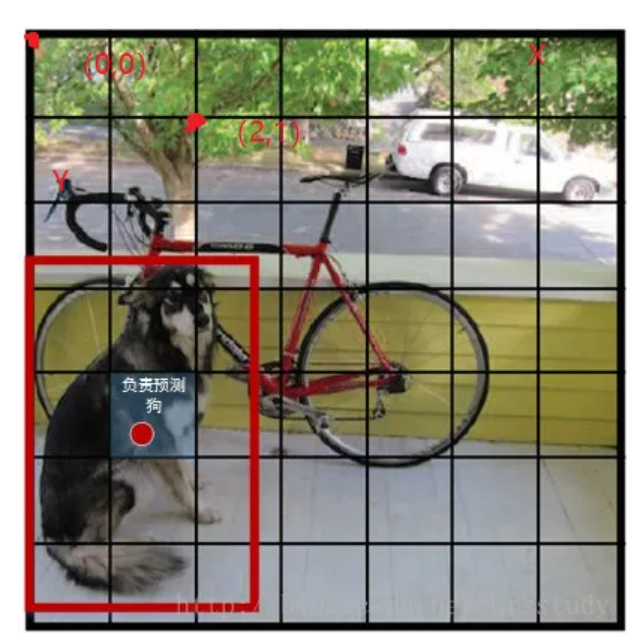
YOLO的第一步是分割图片,将图片分割成个格子,每个格子的大小都是相等的。如果这些框每一个只能识别一个物体,并且要求物体必须落在这个框之内,那么就和以前的滑窗法没有任何区别了。但是YOLO认为只要求物体的中心落在这个框之中就好了。
对于每个框都预测B个bounding box,其中有5个值,中心位置(x,y)、h、w,以及这次预测的置信度c,每个框还需要有一个类别,假设有C个类别,用one-hot编码表示,因此整张图的ground truth长度为:
YOLO的CNN网络将图片分割成个格子,每个单元格负责去检测哪些中心点落在该格子内的目标。如图所示,狗这个目标的中心落在这个单元格内,那么这个单元格就负责预测这个狗。每个边界框的置信度包含两个方面,一是这个边界框含有目标的可能性大小 $Pr(object) IOU_{pred}^{truth} Pr(object)*IOU_{pred}^{truth}(x,y,w,h)(x,y,w,h,c) Pr(class_i|object)$,但是这种方法,不管一个单元格中预测多少个边界框,只能预测一组类别概率值,这意味着一个格子只能负责一个目标的预测。
以PASCAL VOC数据为例,其中共有20个类别,如果使用,那么最终的预测结果就是大小的张量,30的计算是5乘以2加上20,因为最后的类别是用one-hot编码表示的,所以需要加上20。
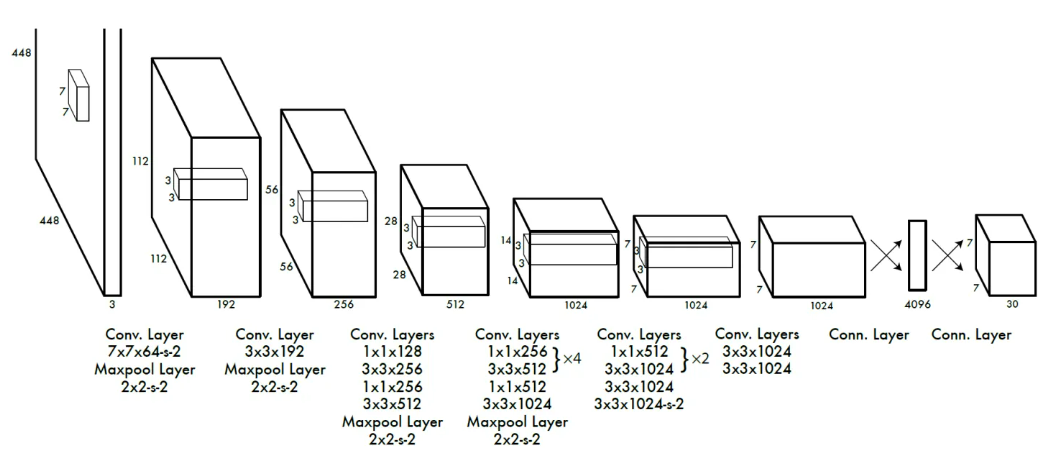
YOLO采用卷积神经网络来提取特征,最后网络输出大小的张量,其张量所代表的含义是,对每一个单元格,前20个值是类别概率值,然后2个是边界框置信度,最后8个是边界框的(x,y,w,h)。
最后是需要了解一下所使用的训练损失函数。该损失函数由两部分组成,定位误差和分类误差。定位误差是边界框坐标预测误差,采用较大的权重,定位误差中区分不包含目标的边界框与含有目标的边界框的置信度。对于不包含目标的边界框,采用较小的权重值,其余权重均设为1。由于较小边界框的坐标误差应该要比较大边界框更敏感,因此将网络的边界框的宽高预测改为对其平方根的预测。由于每个单元格预测多个边界框,但是其对应类别只有一个,那么在训练时,该单元格内存在目标的话,只选择与ground truth IOU最大的那个边界框负责预测该目标,而其他边界框认为不存在目标。这样可以保证一个单元格对应的边界框更加专业化,其可以适用于不同大小、不同高宽比的目标,从而提升模型性能。但是缺点在于如果一个单元格内确实存在多个目标的话,YOLO就只能选择其中一个来进行训练。
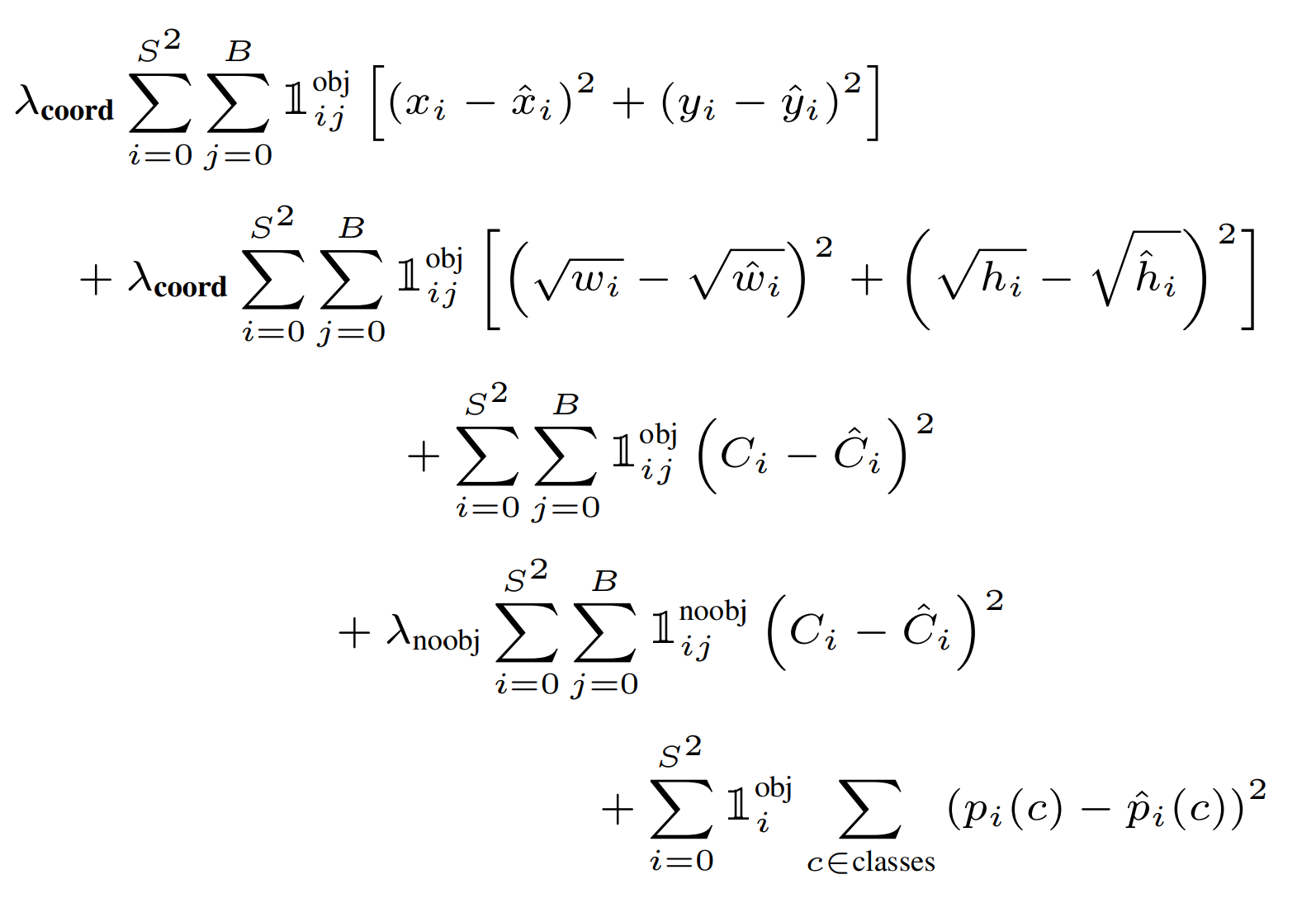
损失函数第一项,边界框中心坐标的误差项,对每一个单元格中的每一个边界框,有目标的就计算中心坐标误差损失;
第二项,边界框高宽的误差项;
第三项,对包含目标的边界框的置信度误差项;
第四项,不包含目标的边界框的置信度误差项;
第五项,包含目标的单元格的分类误差;
非极大值抑制算法(non maximum suppression, NMS),用于解决一个目标被多次预测的问题,就是一个目标出现了多个框的问题。从所有检测框中找到置信度最大的框,然后挨个计算其与剩余框的IOU,如果IOU大于一定阈值,就将该框剔除;反复该过程,直至处理完所有的检测框。
优点:比二阶段方法快;
缺点:每一个网格仅预测两个框,并且每个网格的预测类别有限,不适合物体密集情况;
YOLO-v2
同一作者针对V1存在的问题,于2017年进行了修改,包括:更改骨干网络;引入PassThrough;借鉴二阶段方法的思想添加预选框;
骨干网络换成了Darknet-19,有1000个类别;passthrough其实就和跳跃连接差不多;Fast RCNN和RCNN都是使用selective search搜选预选框的,而Faster RCNN中提出了RPN的网络,因此YOLOv2结合了RPN网络,对特征图生成anchor boxes;
YOLO-v3
同一作者于2018年提出了YOLOv3结构,主要改进是引入了残差结构,并借助特征金字塔FPN的思路,在三个不同的尺寸上分别进行预测;
YOLO-v4
2020年,其余团队在YOLOv3的基础上进行大量修改和改进之后提出了YOLOv4结构;改进其实是用了很多的策略;